평균은 데이터의 총합을 데이터 개수로 나눈 값이다. 예를 들어 $k$개의 데이터가 있을때, 평균은 다음과 같이 계산한다.
위 식은 데이터를 모두 모아서 한꺼번에 계산하는 식으로 배치식(batch expression)이다. 이 배치식에 데이터를 하나 추가하려면 모든 데이터를 다시 더해서 $k+1$로 나눠야 한다. 이 과정은 앞서 계산한 평균($\overline{x_k}$)을 전혀 써먹지 못한다. 그리하여 앞서 계산한 평균을 활용할 수 있는 재귀식이 필요하다.
재귀식은 이전 평균값과 추가된 데이터 그리고 데이터 개수만 저장하면 된다. 데이터의 양이 늘어나면 배치식 보다 재귀식이 메모리 저장공간의 측면과 계산성능 측면에서 유리하다. 이제 식 \ref{1.1}을 재귀식으로 바꿔보자. 재귀식을 유도하는 과정에 필요한 $k-1$개의 평균 계산식을 사용한다.
식 \ref{1.1}의 양변에 $k$를 곱한다.
이 식의 양변을 다시 $k-1$로 나누면 다음과 같은 식이 된다.
여기서 우변의 $x_k$를 따로 분리해서 두개의 항으로 만들면 다음의 식이 된다.
우변의 첫 번째 항은 식 $\ref{1.2}$의 $\overline{x_{k-1}}$의 정의와 같다. 따라서 위의 식은 다음과 같이 쓸 수 있다.
이 식의 양변을 ${k \over k-1}$로 나누면 다음과 같은 재귀식이 나온다.
식 $\ref{1.3}$을 이용해 평균을 계산하려면 직전 평균값 $\overline{x_{k-1}}$과 데이터 개수 $k$, 그리고 새로 추가된 데이터 $x_k$만 있어도 된다. 그러므로 평균 필터는 하나씩 차례로 입력되는 데이터의 평균을 계산할 때 유용하다.
식 $\ref{1.3}$을 더 간결하게 표현해보자. $\alpha = {k-1 \over k}$라고 정의하면 $\alpha$와 $k$ 사이에는 다음과 같은 관계식이 성립한다.
이제 $\alpha$의 정의와 위 식을 식 $\ref{1.3}$에 대입하여 정리하면 다음과 같은 재귀식을 얻을 수 있다.
식 $\ref{1.4}$의 이름은 평균 필터(Averaging filter)이다.
이제 평균 필터를 MATLAB의 함수로 구현한다. 이 함수는 측정값을 인자로 받아 평균을 반환한다.
AvgFilter.m
function [ avg ] = AvgFilter(x)
% 평균 필터 함수
% 재귀적 구현
persistent prevAvg k
persistent firstRun
if isempty(firstRun) %
k = 1; %
prevAvg = 0; %
% part A
firstRun = 1; %
end %
alpha = (k - 1)/k;
avg = alpha*prevAvg + (1-alpha)*x;
prevAvg = avg;
k = k+1;
end
MATLAB의 persistent variable은 함수의 호출이 끝난 뒤에도 값이 그대로 유지된다. C/C++의 static variable처럼 생각하면 된다. 위 코드에서 part A는 초기화 부분으로 함수가 처음 호출될 때 한 번만 실행된다.
다음은 위 평균 필터 함수를 테스트하는 예제이다.
TestAvgFilter.m
clear all
% 평균 필터 테스트
% 0.2초 간격으로 전압측정
dt = 0.2;
t = 0:dt:10;
Nsamples = length(t);
Avgsaved = zeros(Nsamples, 1);
Xmsaved = zeros(Nsamples, 1);
for k=1:Nsamples
xm = GetVolt();
avg = AvgFilter(xm);
Avgsaved(k) = avg;
Xmsaved(k) = xm;
end
figure
plot(t, Xmsaved, 'r:*')
hold on
plot(t, Avgsaved, 'o-')
xlabel('Time[sec]');
ylabel('Volt[V]');
GetVolt.m
function [ z ] = GetVolt()
% 전압을 읽어오는 함수
% 평균 14.4 볼트, 잡음이 섞여있음 잡음의 평균은 0 이고 표준편차가 4
w = 0 + 4*randn(1,1);
z = 14.4 + w;
end
위 GetVolt.m은 전압값을 읽어오는 함수로 측정하는 전압은 평균이 $14.4$ 볼트이고 잡음이 섞여있다. 잡음의 평균은 $0$ 이고 표준편차가 $4$라고 가정한다. 잡음은 MATLAB의 내장함수 randn로 만들었다. 아래는 실행 결과이다.
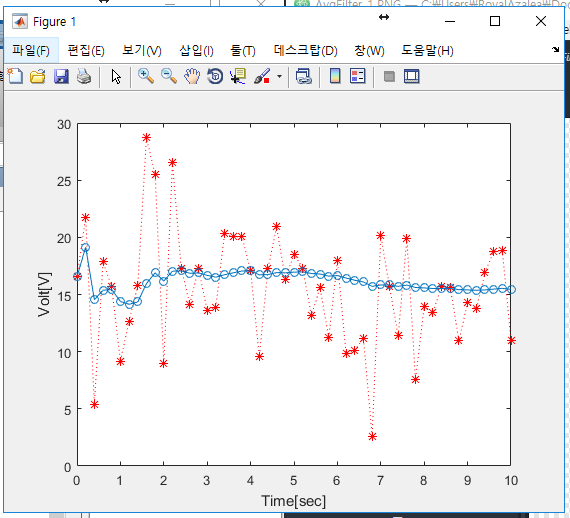
정리하면 재귀식인 평균 필터는 직전 평균값과 데이터 개수만 알면 쉽게 평균을 구할 수 있다. 특히 데이터가 순차적으로 입력되는 경우에는 데이터를 저장할 필요가 없고 계산 효율도 높다. 만약 데이터를 실시간으로 처리해야 한다면 재귀식 형태의 필터가 필수다. 참고로 평균을 내면 잡음이 제거되는 효과가 있음!